[電子工作No.2] DCモータ制御その4(正転・逆転判定&割り込み回数カウント)
今回は、エンコーダの正転・逆転判定と割り込み回数のカウントについて投稿したいと思います。 Arduinoのシリアルモニタで割り込み回数カウント ArduinoIDEでコードを作成。※このコードを作成した後、割り込みがうま … 続きを読む
今回は、エンコーダの正転・逆転判定と割り込み回数のカウントについて投稿したいと思います。 Arduinoのシリアルモニタで割り込み回数カウント ArduinoIDEでコードを作成。※このコードを作成した後、割り込みがうま … 続きを読む
今回は前回作成した機体を動かした結果を投稿します。 1回目(転倒) 2回目(ボールキャスター追加) 転倒防止のため、ボールキャスターを1個追加して動かしてみました。 3回目(回転速度調整) 左のタイヤの回転速度を少し遅く … 続きを読む
今回は「[電子工作No.2]DCモータ制御その2」を応用して作成した、2輪駆動ロボットについて投稿します。[電子工作No.2] DCモータ制御その2(速度制御) | Beaver'sHive Blog … 続きを読む
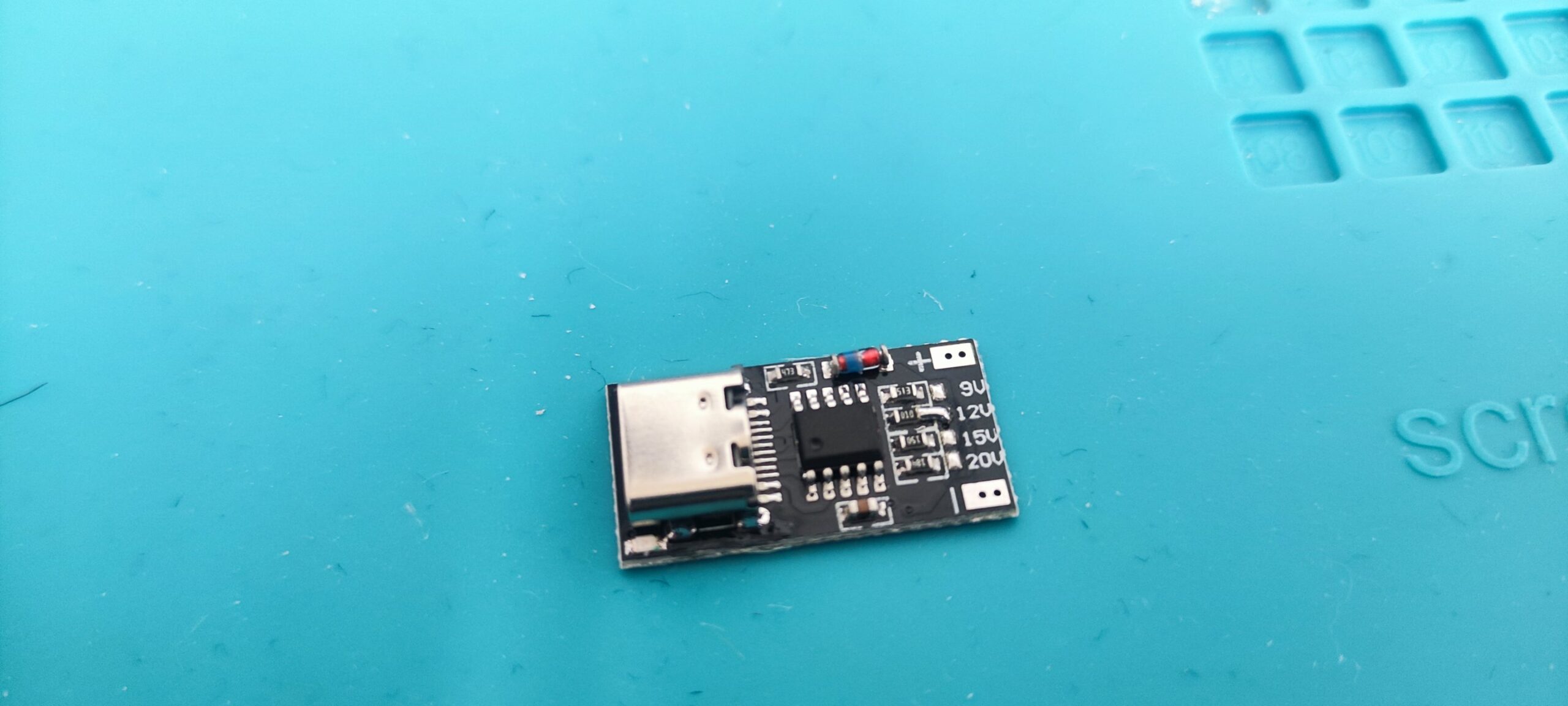
ロボットなどの電源を取る方法といえば、鉛蓄電池やリポバッテリー(リチウムポリマー)が思いつきます。 それらの方法もいいのですが、鉛蓄電池は重い、リポバッテリーは扱い注意&容量比で考えるとそこそこ値段がします。 そこで、巷 … 続きを読む
今回はエンコーダ波形の測定結果について投稿します。 12VDCモータ動作確認 データシートに書かれた配線に従って動作を確認直流安定化電源を用いて赤に+V、黒に-Vを接続 回路作成 回路作成時の注意(オープンコレクタについ … 続きを読む
今回はモータドライバとArduinoを用いたモータの速度制御について投稿します。 (正転・逆転)制御 TA7291Pのモータドライバを使って速度制御を行おうとしていたのでAmazon.co.jp: Motor Drive … 続きを読む
エンコーダ付きDCモータの制御について学べる機会をいただくことができたので、活動の記録を投稿します。DCモータは「SHA YANG YE Industrial」のブラシ付きDC12Vモータユニットを使用します。DCギヤー … 続きを読む
今回は機能について投稿します。 回路図 この回路は大きく分けて、電源部・駆動部・制御部に分けて考えることができます。 電源部 まず電源部、今回の電源は単3電池4本(1.5V×4=6.0V)を使用し、半固定抵抗でLEDの調 … 続きを読む
今回は使用した材料と回路図について投稿します。 ↑LEDの部分とクリスマスリースの部分を分解した時の写真 用意するもの 回路図 上記の回路図はLEDが2個の時のものです。回路図の赤の点線で囲んだ部分は、白の絶縁電線・47 … 続きを読む
記念に投稿 Beaver’sHIVE創立後、初めて作った作品です。クリスマスの日からしばらくたっていますが、撤去する前に記念として投稿します。 材料・機能等は、また今度投稿しようと思います。